
Robot z napędem na 4 koła
Jesień za oknem. Szare niebo i deszcz skłoniły mnie do zrobienia czegoś ciekawego. Czegoś co sprawi radość innym. Zbudowałem robota dla mojego 3-letniego syna. Jest to prosty robot z napędem na 4 koła z możliwością dalszej rozbudowy o dodatkowe czujniki i mechanizmy. Pojazd musi być ładny, bo tylko ładne roboty trafiają do robo-nieba po tym jak 3-latek skończy się nimi bawić. Całością steruje płytka BBC micro:bit. Wybrałem ją, ponieważ łatwo się ją programuje, można nią sterować przez radio NRF24 oraz Bluetooth. W grę wchodzą więc funkcje autonomiczne oraz zdalne sterowanie.
Czytaj dalej...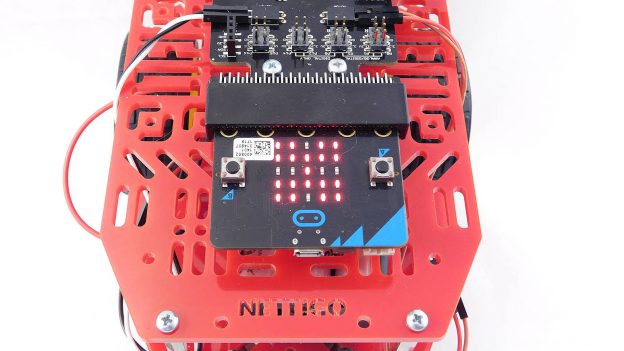
Najnowsze komentarze