:MOVE Motor – nowy robot dla micro:bit od Kitronik
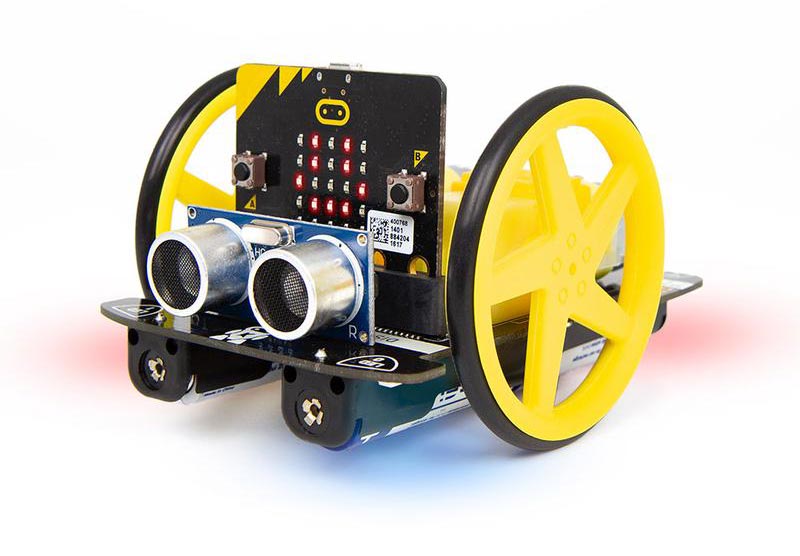
W ofercie brytyjskiego producenta zestawów i komponentów edukacyjnych Kitronik pojawiła się interesująca nowość. Mowa o podwoziu robota o nazwie :MOVE Motor. Ten dość niepozornie wyglądający na pierwszy rzut oka dwukołowiec ma jednak do zaoferowania całkiem sporo, jednocześnie nie przytłaczając ilością dostępnych funkcji oraz rozszerzeń. Prezentowane urządzenie to całkiem fajnie zbalansowany zestaw dla początkujących w obszarze robotyki, jak i programowania z BBC micro:bit. Możliwości :MOVE Motor Zacznijmy zatem od tego, co to maleństwo potrafi, prezentując kluczowe możliwości :MOVE Motor. Współpraca z BBC micro:bit – dzięki temu, robota programowali będziemy blokowo w edytorze MakeCode lub w języku Python za sprawą obsługi MicroPython;
Czytaj dalej...

Najnowsze komentarze