Robo kit – uruchomienie
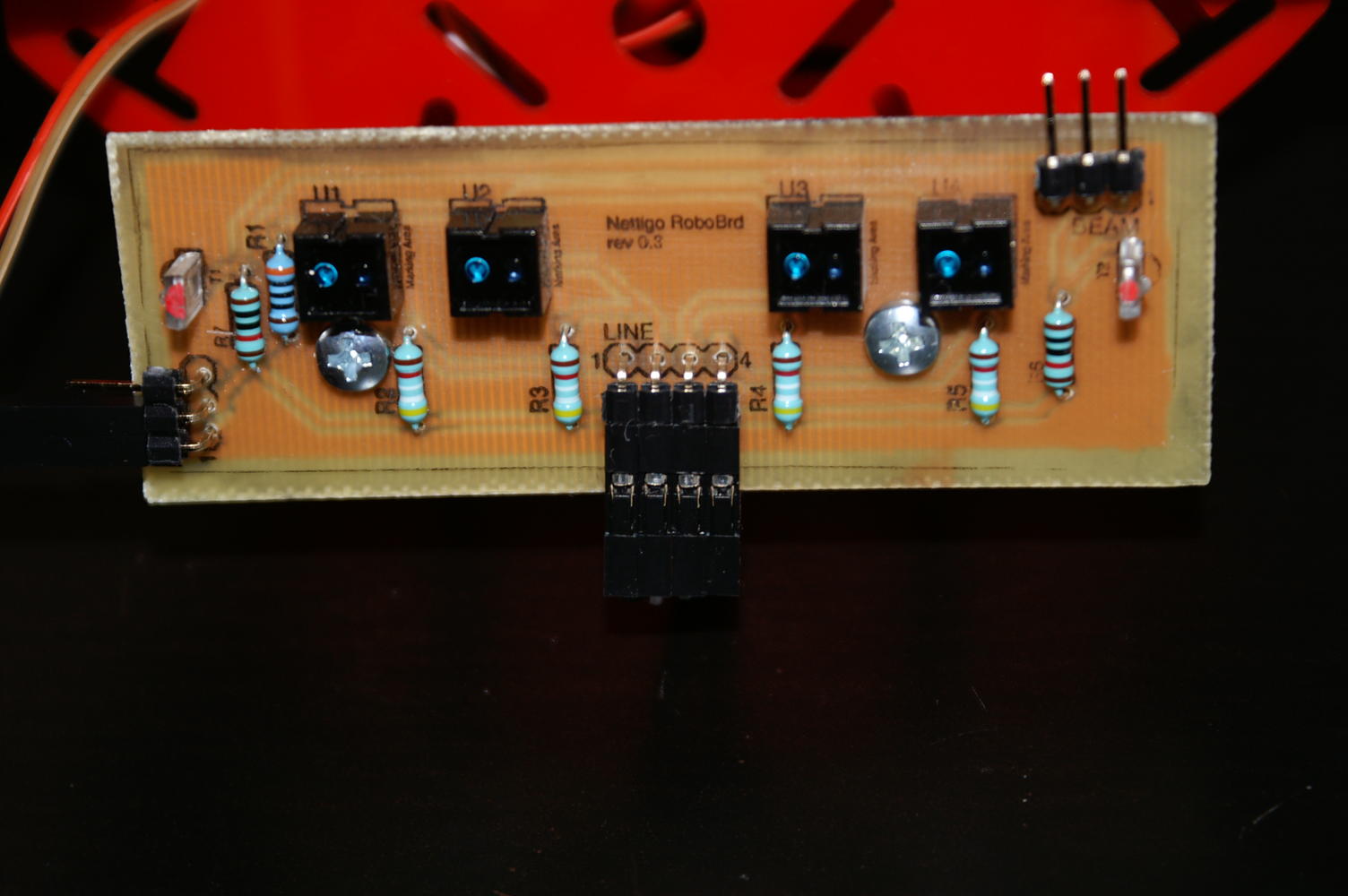
Kiedy już wszystko mamy polutowane, czas podłączyć płytkę czujników do naszego robota. Zdjęcia poniżej pokazują gotową wytrawioną płytkę, która w niedługim czasie pojawi się w zestawie zamiast dotychczasowej płytki uniwersalnej.
W poprzednich artykułach został poruszony montaż czujników na płytce uniwersalnej oraz dwa programy umożliwiające wykonanie robota w wersji „beam follower” lub „line follower”. W celu łatwiejszego szukania poniżej znajdują się linki do poprzednich artykułów, tak aby wszystko co potrzebne do złożenia robota było w jednym miejscu.
Podłączenie do robo kit’a
Na płytce mamy wyprowadzone trzy złącza, jedno oznaczone jako “line”, drugie jako “beam”, natomiast trzecie to zasilanie. W zależności od funkcji jakie ma nasz robot pełnić będziemy podłączać odpowiednie złącze. Jeśli planujemy wykonać beam follower’a będziemy się podłączać do wyjścia beam, obsługującego fototranzystory. Złącze “line” obsługuje cztery transoptory CNY70. Numerek przy pierwszym pinie oznacza numer transoptora.
Spójrzmy jeszcze na złącze zasilania. Są tam trzy piny, ale pierwszy i ostatni to masa. Środkowy pin to +5V. Pamiętajmy, aby odwrotnie nie podłączyć zasilania, gdyż może się to skończyć uszkodzeniem czujników.
Kiedy już zapoznaliśmy się z płytką przejdźmy do jej montażu w robocie. Do tego celu wykorzystamy tulejki dystansowe o długości 30mm. Tak przygotowaną płytkę musimy zamontować na przodzie robota.
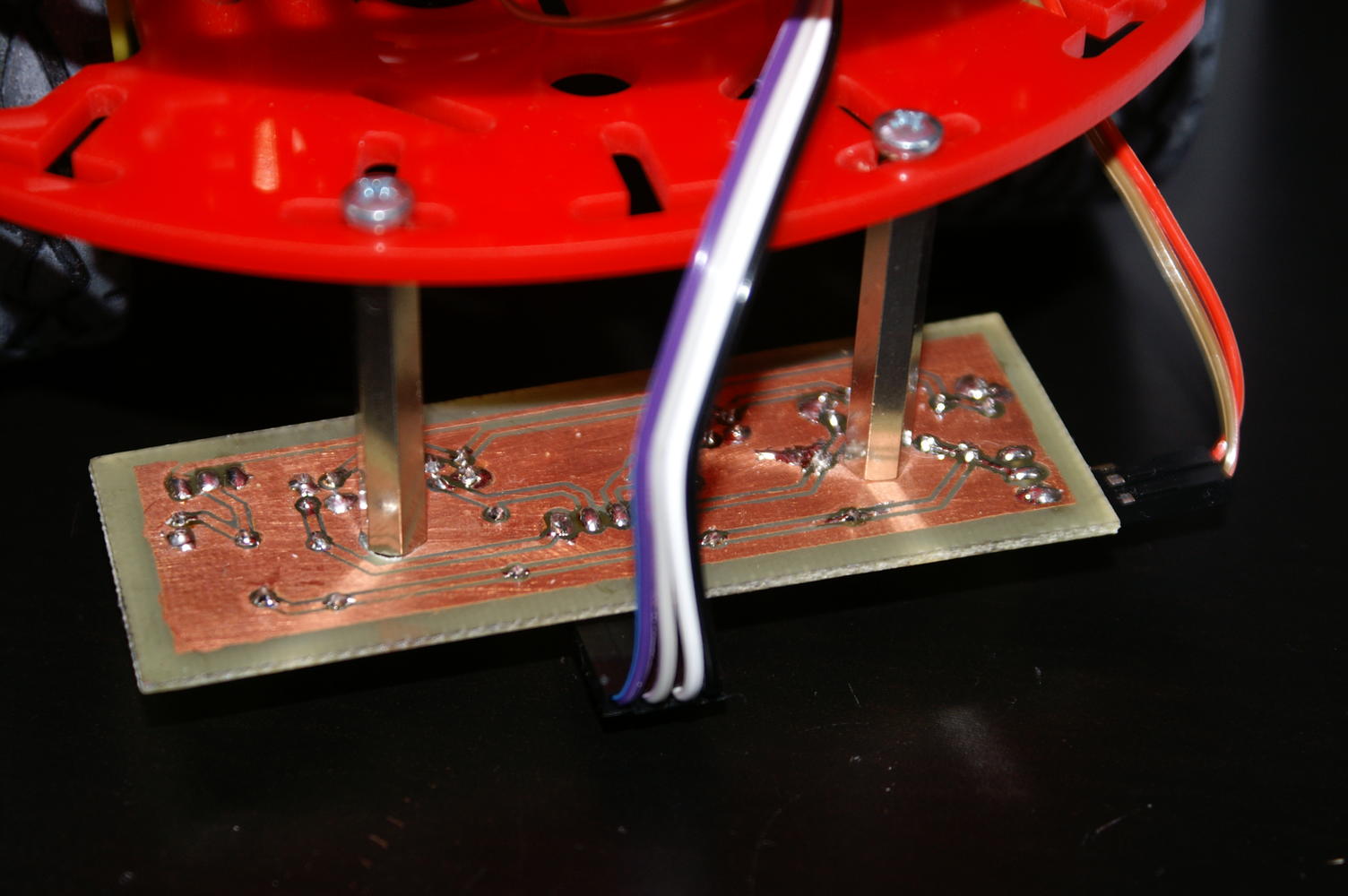
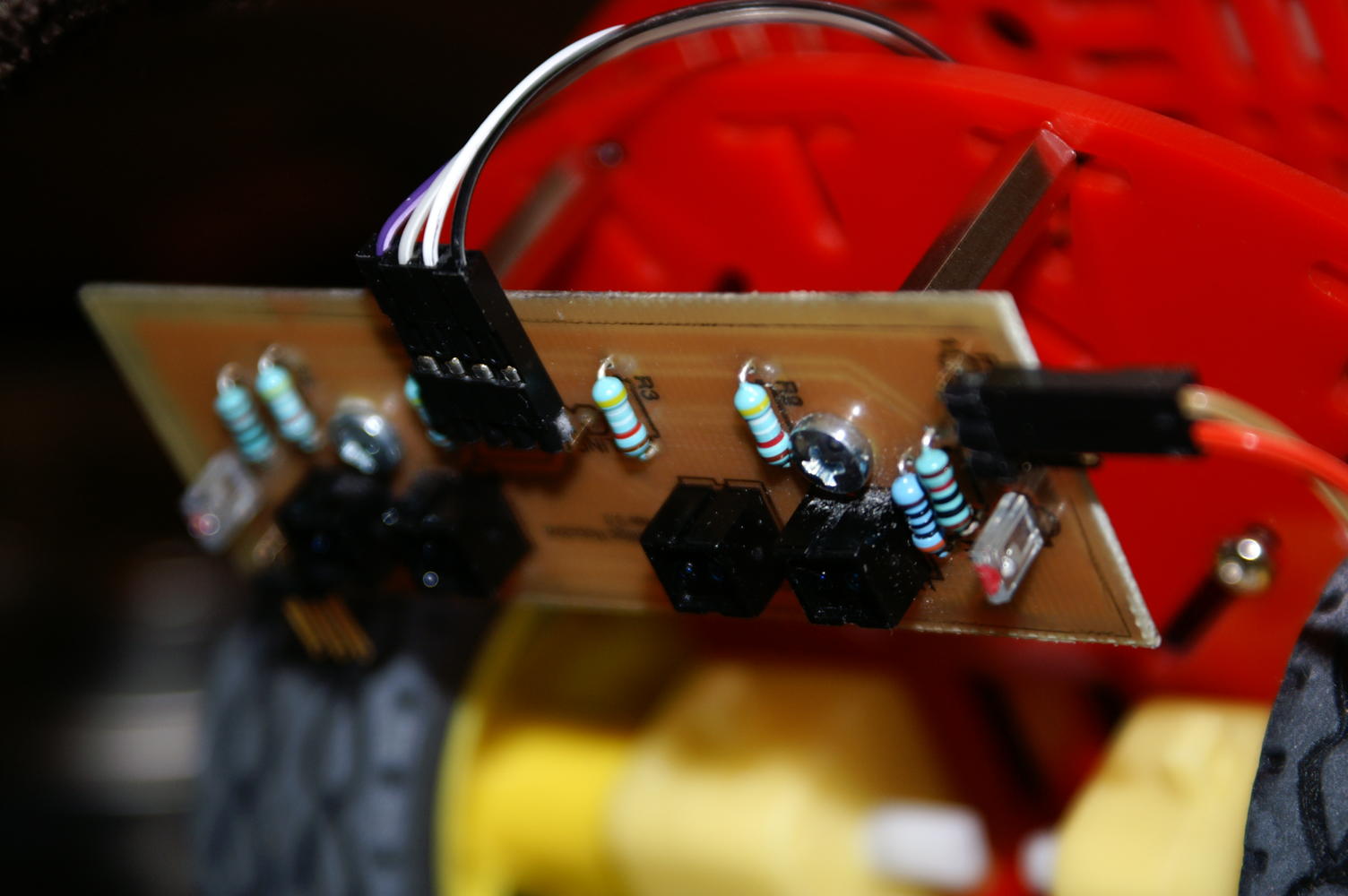
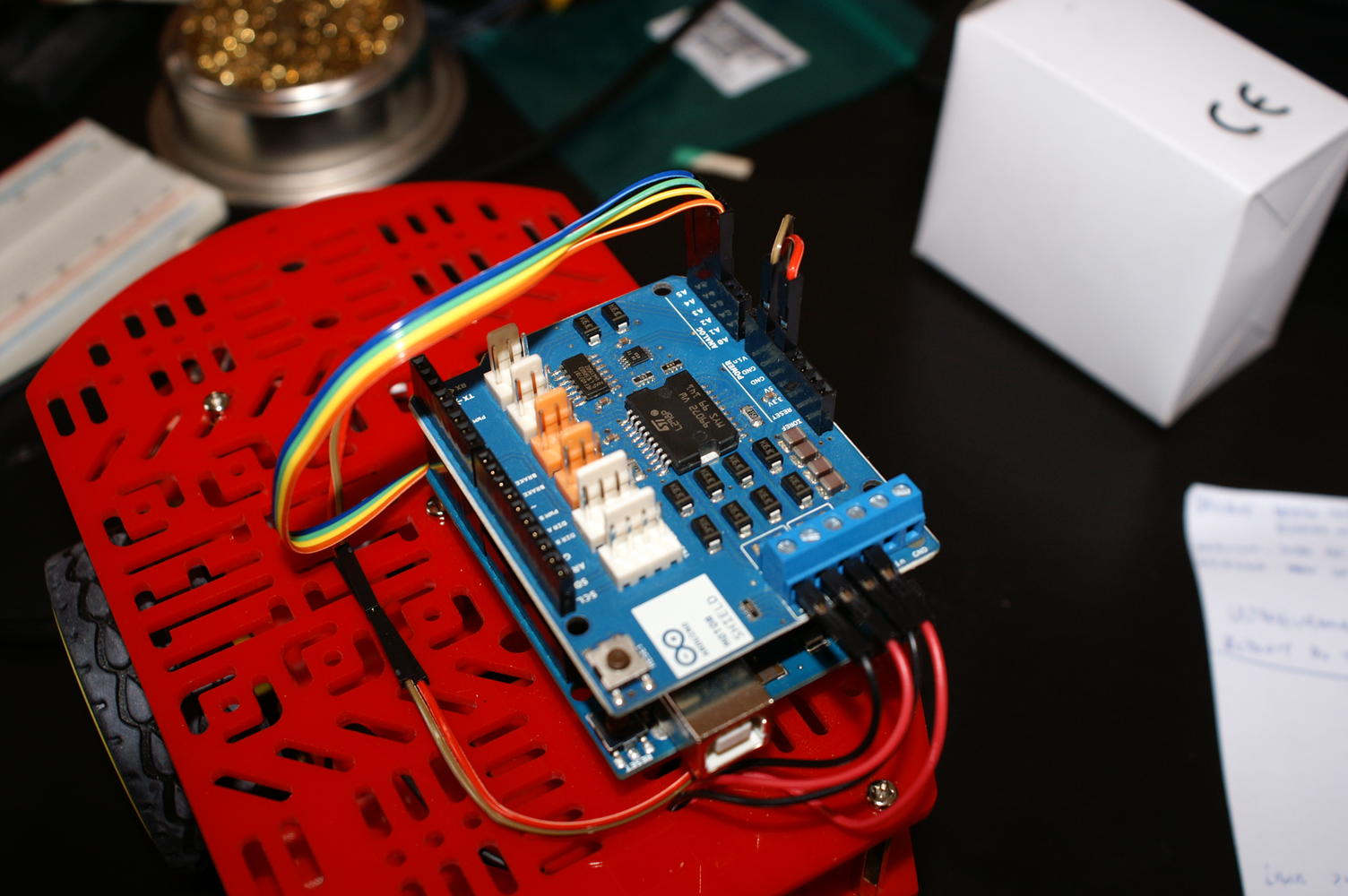
Kolejnym krokiem jest podłączenie czujników do Arduino. Tu mamy dwa wyjścia, możemy sami wykonać kable o odpowiadającej nam długości lub skorzystać z gotowych. Jeśli planujemy skorzystać z gotowych musimy się liczyć z tym, że będą one za krótkie i trzeba będzie ją ze sobą łączyć. Poniższe zdjęcia pokazują wykorzystanie gotowych łączonych ze sobą kabli.
Robot przedstawiony na zdjęciach to line follower, czyli podłączyliśmy tylko transoptory CNY70. Do tego celu użyliśmy taśmy z kolorami odpowiadającymi numerom czujników. Poniżej znajduje się tabelka pokazująca podłączenie CNY70 z wykorzystaniem łączonych kabli.
|
CNY70 |
kolor 1 |
kolor 2 (do Arduino) |
pin w Arduino |
|
1 |
czarny |
niebieski |
A5 |
|
2 |
biały |
zielony |
A4 |
|
3 |
szary |
żółty |
A3 |
|
4 |
fioletowy |
pomarańczowy |
A2 |
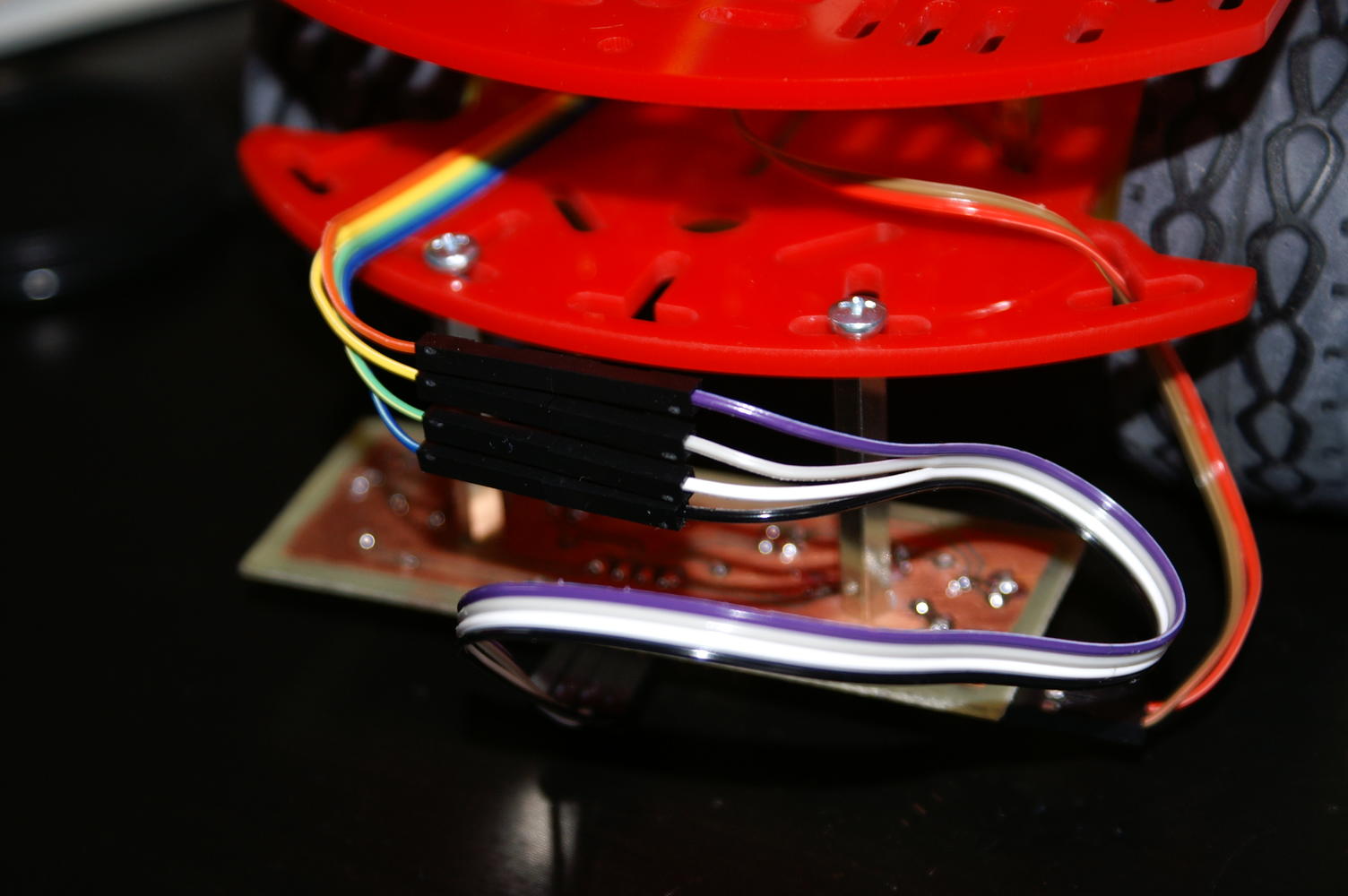
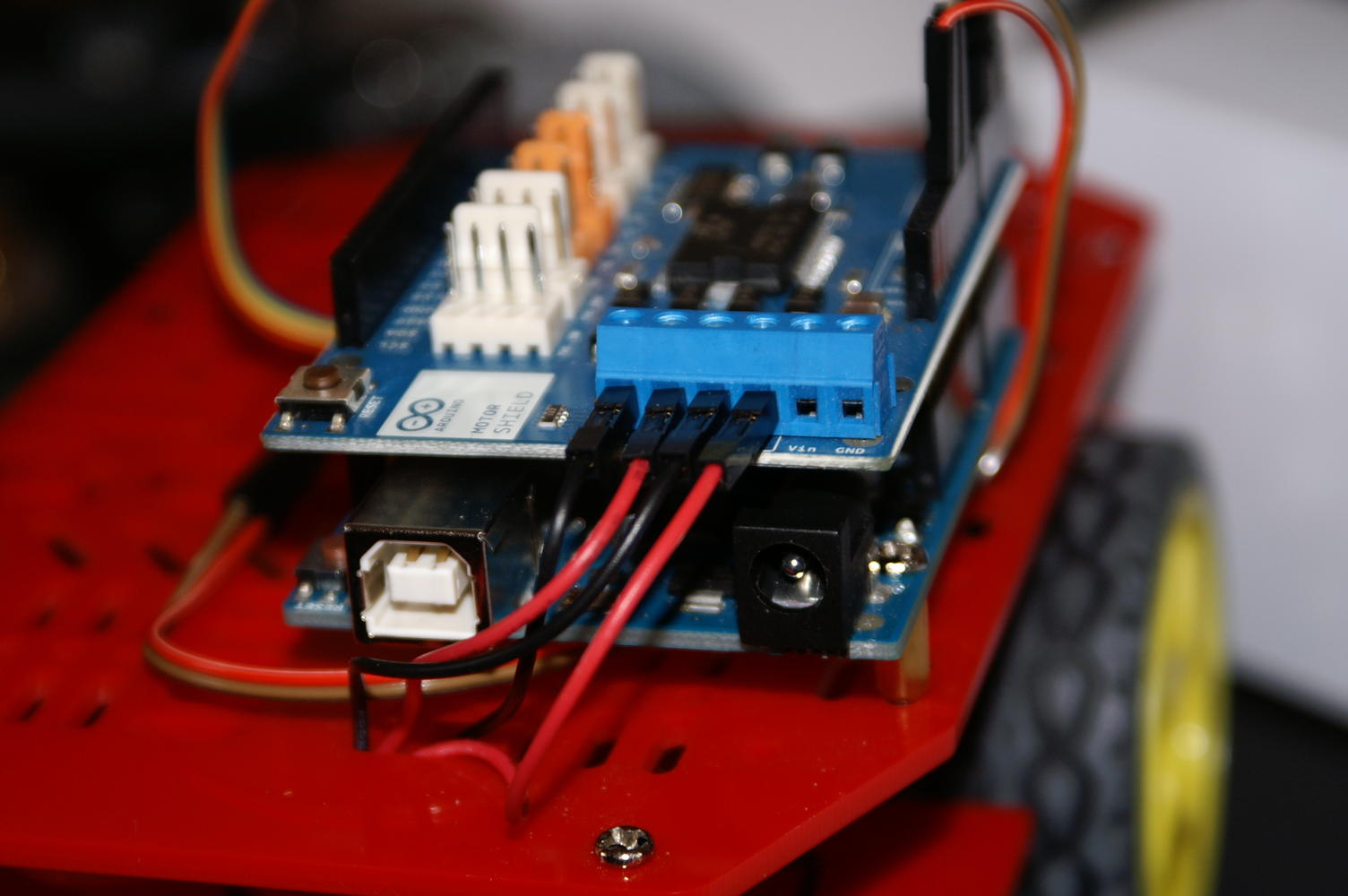
Ostatnim etapem podłączenia naszej płytki będzie zasilanie. Do tego celu również użyliśmy dwóch połączonych kabli o tych samych kolorach. Brązowy kolor odpowiada masie, a czerwony +5V.
Pozostało nam jeszcze podłączyć napęd. Silniki będą podłączone do motor shield’a do wejść A (silnik prawy) i B (silnik lewy). Pamiętajmy o odpowiednim podłączeniu silników. Kolor czarny to masa (-), a czerwony to plus (+). Jeśli zrobimy inaczej, to silnik będzie się kręcić w przeciwną stronę.
Zasilanie
Na sam koniec pozostawiłem kwestie zasilania. Jak zapewne zauważyliście w zestawie znajdują się dwa koszyki na baterie. W sumie mamy możliwość zasilenia naszego robota z sześciu baterii/akumulatorków. Oczywiście istnieje też możliwość zasilania poprzez zasilacz, ale raczej mało komu będzie się chciało biegać za robotem ciągnąc przedłużacz.
W artykule dotyczącym line follower’a poruszone zostało zasilanie. Wyszło, że najlepiej jest zasilić robota napięciem 7.4V. Oczywiście można i dołożyć mały akumulator żelowy 12V. Zanim jednak zaczniemy się bawić w zmiany zasilania, zobaczmy jakie maksymalne napięcie obsługuje nasz motor shield i nasze silniki.
Powróćmy jednak do koszyków z zestawów.
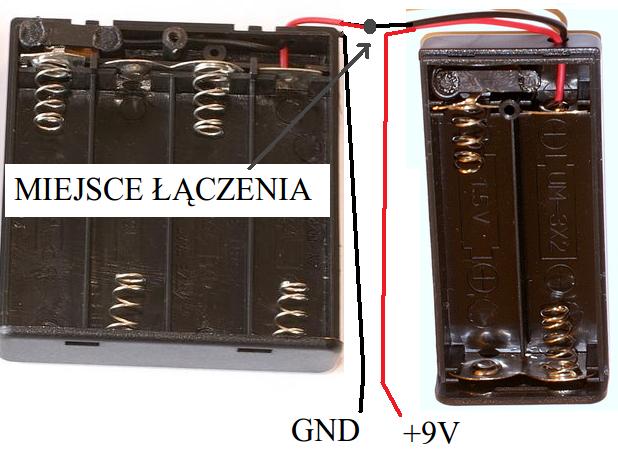
Koszyki pozwalają na szeregowe połączenie baterii, czyli np. wkładając 4 baterie do koszyczka na jego wyjściu dostaniemy napięcie 6V (zakładając, że włożyliśmy baterie,a nie akumulatorki, bowiem akumulatorek po naładowaniu daje napięcie 1.2V).
Nie wgłębiając się w szczegóły, możemy przyjąć, że szeregowe łączenie powoduje sumowanie się napięć. Natomiast gdybyśmy chcieli połączyć baterie tak jak na drugim schemacie, czyli równolegle, wtedy otrzymamy te same napięcie, ale pojemność takiego pakietu będzie równa czterokrotnej pojemności jednej baterii (pojemności w połączeniu równoległym sumują się, a napięcie pozostaje stałe).

W zestawie dostajemy dwa koszyki, jeden na 4 baterie z wyłącznikiem oraz drugi na dwie baterie. Te dwa koszyki należy połączyć ze sobą szeregowo, otrzymując w ten sposób pakiet mający 9V lub 7.2V jeśli użyjemy akumulatorków.
Tak przygotowany robot jest gotowy do wgrania programu ruszenia w swoją pierwszą podróż po torze. Nie zapomnijcie naładować baterii.
Cały program do pobrania z nettigo.pl
Proszę o pomoc.
Przy weryfikowaniu kodu wychodzi mi lista błędów:
BlinkWithoutDelay:6: error: 'MS_DCMotor’ does not name a type
BlinkWithoutDelay:7: error: 'MS_DCMotor’ does not name a type
BlinkWithoutDelay.ino: In function 'void steruj(odczyty)’:
BlinkWithoutDelay:33: error: 'prawy’ was not declared in this scope
BlinkWithoutDelay:34: error: 'lewy’ was not declared in this scope
BlinkWithoutDelay.ino: In function 'void setup()’:
BlinkWithoutDelay:80: error: 'prawy’ was not declared in this scope
BlinkWithoutDelay:81: error: 'lewy’ was not declared in this scope
BlinkWithoutDelay:82: error: 'FORWARD’ was not declared in this scope
BlinkWithoutDelay:82: error: 'RELEASE’ was not declared in this scope
W czym rzecz?
Pewnie nie zainstalowałeś jakiejś biblioteki.